Task Settings
1. Mow
Toggle the button to on/off to enable/disable the mowing function.
2. Sweep
Toggle the button to on/off to enable/disable the sweeping function.
3. Dumping Interval
The robot will dump once based on the settings.
4. Task Speed
The speed of the robot when mowing.
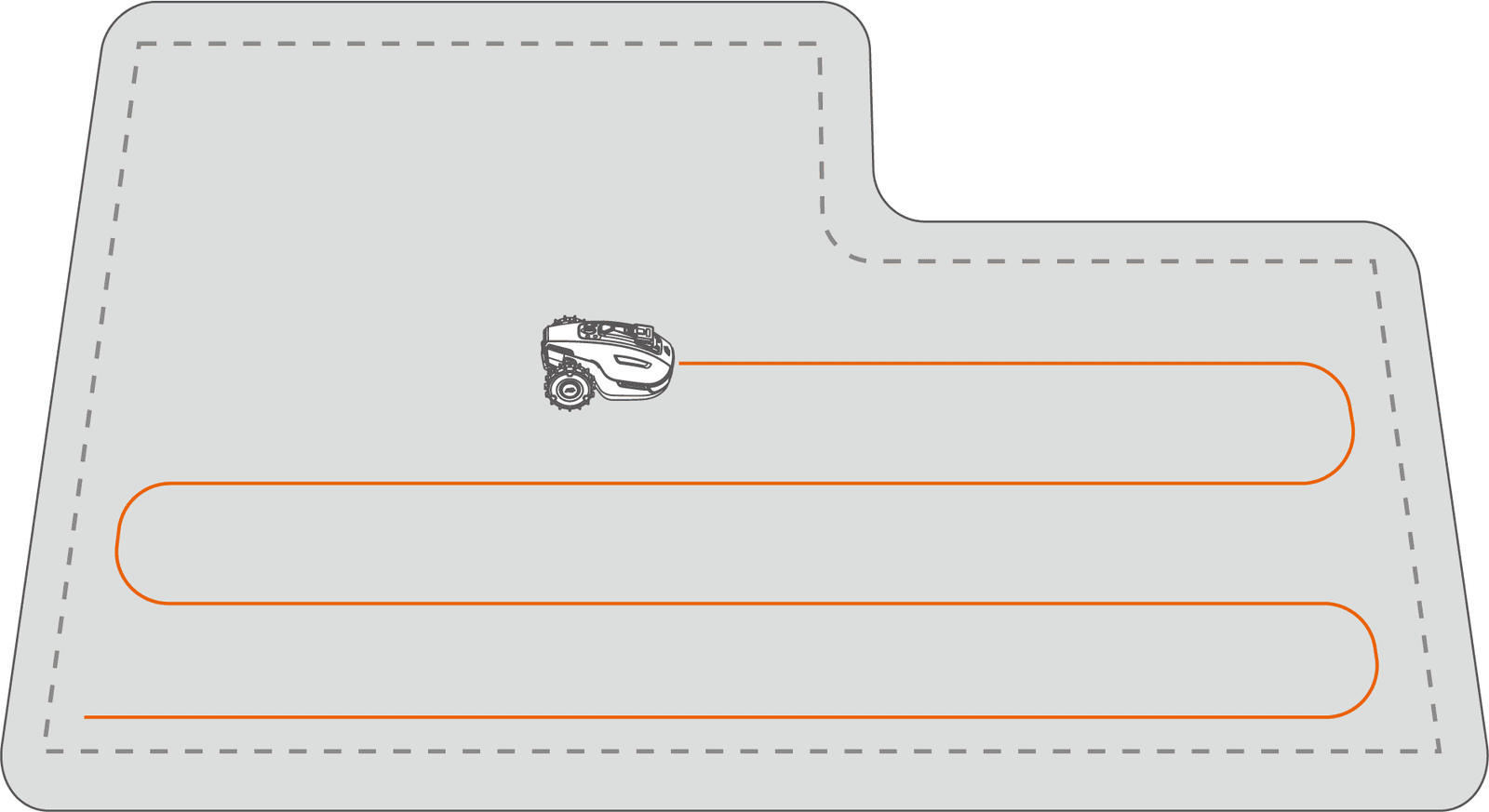
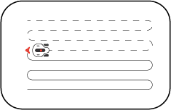
5. Cutting Path Mode
● Zigzag Path
The robot will work in straight rows.
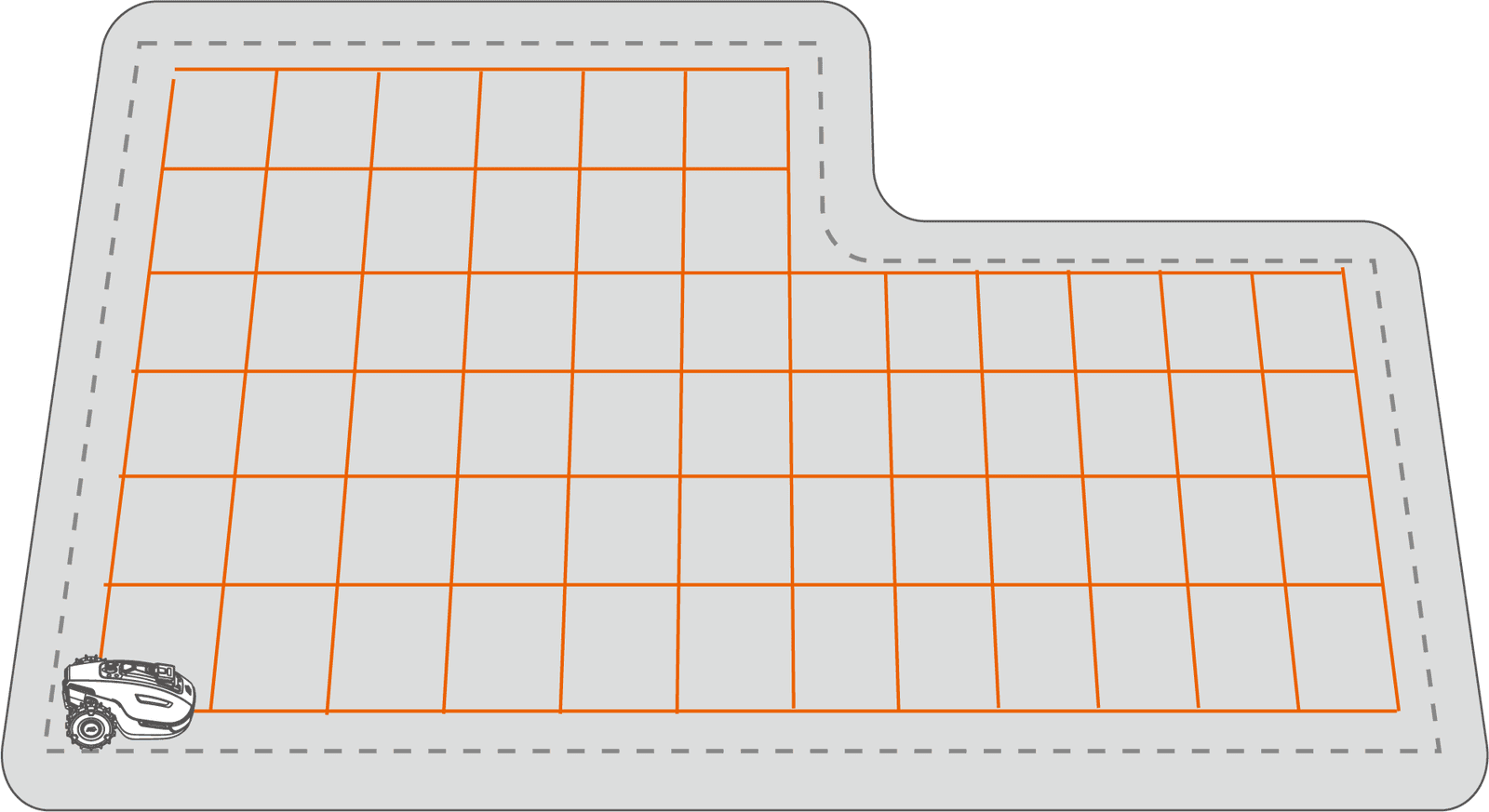
● Chess Board Path
The robot will work in straight rows both horizontally and vertically.
6. Path Spacing (cm)
The spacing between 2 mowing paths.
7. Obstacle Detecting Mode
The spacing between 2 mowing paths.
Direct Touch
In this mode, the robot will bypass obstacles after a front bumper collision and will move at a constant speed. Suitable for overgrown lawns.
In this mode, the robot will bypass obstacles after a front bumper collision and will move at a constant speed. Suitable for overgrown lawns.
Slow Touch
In this mode, the robot will slow down upon detecting obstacles in the front and will bypass them after a front bumper collision, minimizing impact. Suitable for lawns with more bushes.
No Touch
In this mode, the robot will bypass all obstacles upon detection
8. Perimeter Mowing Laps
The mowing circles at the perimeter.
*In the Perimeter Laps Only mode, the perimeter mowing laps cannot be set 0.
9. No-go Zone Mowing Laps
The grass-mowing circles surrounding the perimeter of the restricted area.
10. Path Order
Perimeter First
The robot starts working from the perimeter.
Zigzag First
The robot starts working from zigzag path.
*Available for zigzag path and chess board path modes.
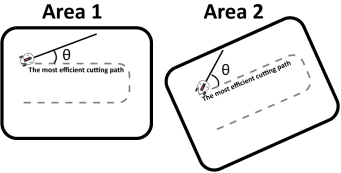
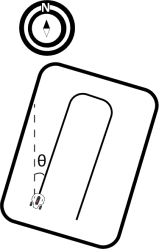
11. Cutting Path Angle (°)
Relative Angle
Take the most efficient path recommended by algorithm as the 0-degree direction.
Absolute Angle
Take the due north as the 0-degree direction.
12. Start Progress
Related Articles
How to Set Mowing Task
Preparation Remove debris, piles of leaves, toys, wires, stones, and other obstacles from the lawn. Make sure no children or animals are on the lawn. Ensure the robot is within the task area or at the charging station. If not, manually move or guide ...How to Create Task Area
Before Mapping Before mapping, please remove debris, piles of leaves, toys, wires, stones, and other obstacles from the lawn. Make sure no children or animals are on the lawn. Make sure the robot is powered on and has sufficient battery. Mapping Your ...YUKA Series 2024 User Manal - EN
YUKA Series 2024 User Manal - ENHow to Create Channel
The channel is intended to connect various task areas or link the task area with the charging station. 1. Tap Create > Channel on the map page. 2. Tap to start and manually control the robot from a task area to another task area or to the charging ...Non-working Periods
1. Open the Settings menu. 2. Select Non-working Periods. 3. In the Non-working Periods section, configure specific times to mark as non-working periods.